
Linear Algebra for Graphics Geeks (SVD-IX)
I have been getting a surprising number of Google referrals from people wondering how to calculate the SVD of a 2x2 matrix by hand. The number of hits is surprising because I haven't answered this question, and now I'm feeling compelled to answer it.
Calculating the SVD of even a 2x2 by hand is sort of tedious, so maybe what I need to do is start writing about the subject, post that start and hope a sense of duty will compel me to finish it.
On this page, Todd Will calculates the SVD of this matrix by hand using other means. If you want a shorter way to do it, I recommend you go there. What I'm going to do here might be called "the long way," but I'm feeling like a glutton for punishment, so here goes...

In this post, I talked about the U containing the eigenvectors of AAT , V containing the eigenvectors of ATA and S containing the square roots of the eigenvalues.
If you want to calculate the SVD of a 2 x 2 matrix, one way to do it is to start by calculating the eigenvalues of ATA and AAT (they share the same eigenvalues).
To calculate the eigenvalues of a 2 x 2, you need to solve this equation:

Multiplying out lambda leaves you with

Matrix subtraction leaves you with
Calculation of the 2x2 determinant leaves you with

Expanding that leaves you with

This is a quadratic you can solve via the quadratic formula by substituting 1 for a, -(a+d) for b and (ad-bc) for c.
Consider the following 2 x 2 matrix.

Let's use this matrix and see if the method I'm using here brings us to the same results. If we succeed you'll have two means of calculating SVD by hand.

I'll do the work in Scilab:
-->A=[-10 8; 10 -1]
A =
-10. 8.
10. -1.
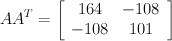
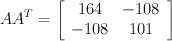
-->AA=A*A'
AA =
164. -108.
-108. 101.
-->z = [164*101-(-108)*(-108) -(164+101) 1]
z =
4900. - 265. 1.
-->q=poly(z,'x','coeff')
q =
4900 - 265x + x^2
-->roots(q)
ans =
20. 245.
The eigenvalues of AAT are 20 and 245, or 2*sqrt(5) and 7*sqrt(5). These are also the eigenvalues of ATA, but I'm not going to work it out here. Finally, the square roots of these values form the elements on the diagonal matrix S in our SVD of A, so they'll return later when we put the whole thing together.

Now that we have the eigenvalues of AAT, we can calculate its eigenvectors. In quick review, an eigenvector is a vector whose direction doesn't change when it's transformed by its matrix. When matrix A transforms its eigenvector X, the length of X may change, but the effect of the multiplication is nothing more than a scaling of X. The scaling factor is the eigenvalue, and it's usually designated with the symbol lambda.

Subtraction gives us

Factoring out X gives us

Earlier (in Scilab) we calculated AAT and its eigenvalues, 20 and 245.
First, we'll plug AAT and 20 into the previous equation.

The product results in these equations.
144*x1 - 108*x2 = 0
-108*x1 + 81*x2 = 0
You might be habitually inclined to seek a unique solution to the system, but we're looking for a vector rather than a point. The two equations are equivalent, and we can find the relationship between x1 and x2 by looking at either. Let's simply look at the first equation.
144*x1 - 108*x2 = 0
144*x1 = 108*x2
x1 = 108/144*x2
x1 = (3/4)*x2
Any multiple of (3/4, 1) should satisfy the equation. Since we'd like the vectors to be unit length (see SVD and orthonormal bases), let's normalize the length of the vector.
Following the Pythagorean theorem, the length of (3/4, 1) is the square root of the following:
sqrt((3/4)2+12) = sqrt(16/16 + 9/16) = sqrt(25/16) = 5/4
It's nice how that worked out.
Our unit length eigenvector is:
(1/(5/4))*(3/4, 1) = (4/5)*(3/4, 1) = (3/5, 4/5)
We have one of the four eigenvectors we need to calculate.

Next we return to the other eigenvalue, 245, and plug it into our eigenvector equation.

This time we get
-81*x1 -108*x2 = 0
-108*x1 -144*x2 = 0
Looking at the first equation again
-81*x1 -108*x2 = 0
-81*x1 = 108*x2
x1 = -108/81*x2
x1 = -4/3*x2
This time our eigenvector solution is (-4/3, 1), which we'll normalize below.
Find the length of the vector
sqrt((-4/3)*(-4/3)+1*1) = sqrt( 16/9 + 9/9) = sqrt(25/9) = 5/3
Again, scale by 1/length
(1/(5/3))*(-4/3,1) = (3/5)*(-4/3,1) = (-4/5, 3/5)
So now we've have unit length eigenvectors of AAT:
(3/5, 4/5) and (-4/5, 3/5).
AAT is symmetric and the eigenvectors of a symmetric matrix are orthogonal, which means their dot product is zero. This is clear by looking at them, but I'll multiply it out, because this post is all about being verbose:
(4/5, 3/5) dot (-3/5,4/5) = (4/5)*(-3/5) + (3/5*4/5) = -12/25 + 12/25 = 0
Let's add our other eigenvector to the first column U. It corresponds to the largest eigenvalue and the top-left "singular value" in the S matrix.

Now that we've calculated U and S, we can solve for V. In doing this, I'm going to exploit some of the properties of U and S.
First, let's multiply the left sides of both equations by the inverse of U. If you recall, because U is an orthogonal matrix, its inverse is its transpose, so we simply need to multiply the left side of the equation by the transpose of U to eliminate U on the right side. In this case, U happens to be symmetric, so it's also its own transpose (that won't always be the case).
A = U*S*VT =
U-1*A = U-1*U*S*VT =
U-1*A = S*VT =

Multiplying both sides by the inverse of S will leave us with VT on the right side. Because S is a diagonal matrix, the inverse is calculated by replacing each element on the diagonal with its reciprocal.
U-1*A = S*VT =
S-1*U-1*A = S-1*S*VT =
S-1*U-1*A = VT =

Multiplying everything out leaves us with the following:
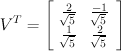
At this point we know U, S and the transpose of V. Putting everything back together leaves us with:
A = U*S*VT =

Update (1/12/2007): If you're reading this, you may be interested in Jim Blinn's paper titled Consider the Lowly 2x2, which you can find on IEEE or in his book Notation, Notation, Notation.
If you want to write a program to calculate the SVD, don't infer the algorithms from this post; sound computational means are found in the classic text Matrix Computations by Golub & Van Loan.
This is post #12 of Linear Algebra for Graphics Geeks. Here are links to posts #1, #2, #3, #4, #5, #6, #7, #8, #9, #10, #11.
Next, some commentary on matrices, elipses and eigen decomposition.
Calculating the SVD of even a 2x2 by hand is sort of tedious, so maybe what I need to do is start writing about the subject, post that start and hope a sense of duty will compel me to finish it.
On this page, Todd Will calculates the SVD of this matrix by hand using other means. If you want a shorter way to do it, I recommend you go there. What I'm going to do here might be called "the long way," but I'm feeling like a glutton for punishment, so here goes...

In this post, I talked about the U containing the eigenvectors of AAT , V containing the eigenvectors of ATA and S containing the square roots of the eigenvalues.
If you want to calculate the SVD of a 2 x 2 matrix, one way to do it is to start by calculating the eigenvalues of ATA and AAT (they share the same eigenvalues).
To calculate the eigenvalues of a 2 x 2, you need to solve this equation:

Multiplying out lambda leaves you with

Matrix subtraction leaves you with

Calculation of the 2x2 determinant leaves you with

Expanding that leaves you with

This is a quadratic you can solve via the quadratic formula by substituting 1 for a, -(a+d) for b and (ad-bc) for c.
Consider the following 2 x 2 matrix.

Let's use this matrix and see if the method I'm using here brings us to the same results. If we succeed you'll have two means of calculating SVD by hand.

I'll do the work in Scilab:
-->A=[-10 8; 10 -1]
A =
-10. 8.
10. -1.
-->AA=A*A'
AA =
164. -108.
-108. 101.
-->z = [164*101-(-108)*(-108) -(164+101) 1]
z =
4900. - 265. 1.
-->q=poly(z,'x','coeff')
q =
4900 - 265x + x^2
-->roots(q)
ans =
20. 245.
The eigenvalues of AAT are 20 and 245, or 2*sqrt(5) and 7*sqrt(5). These are also the eigenvalues of ATA, but I'm not going to work it out here. Finally, the square roots of these values form the elements on the diagonal matrix S in our SVD of A, so they'll return later when we put the whole thing together.

Now that we have the eigenvalues of AAT, we can calculate its eigenvectors. In quick review, an eigenvector is a vector whose direction doesn't change when it's transformed by its matrix. When matrix A transforms its eigenvector X, the length of X may change, but the effect of the multiplication is nothing more than a scaling of X. The scaling factor is the eigenvalue, and it's usually designated with the symbol lambda.

Subtraction gives us

Factoring out X gives us

Earlier (in Scilab) we calculated AAT and its eigenvalues, 20 and 245.
First, we'll plug AAT and 20 into the previous equation.

The product results in these equations.
144*x1 - 108*x2 = 0
-108*x1 + 81*x2 = 0
You might be habitually inclined to seek a unique solution to the system, but we're looking for a vector rather than a point. The two equations are equivalent, and we can find the relationship between x1 and x2 by looking at either. Let's simply look at the first equation.
144*x1 - 108*x2 = 0
144*x1 = 108*x2
x1 = 108/144*x2
x1 = (3/4)*x2
Any multiple of (3/4, 1) should satisfy the equation. Since we'd like the vectors to be unit length (see SVD and orthonormal bases), let's normalize the length of the vector.
Following the Pythagorean theorem, the length of (3/4, 1) is the square root of the following:
sqrt((3/4)2+12) = sqrt(16/16 + 9/16) = sqrt(25/16) = 5/4
It's nice how that worked out.
Our unit length eigenvector is:
(1/(5/4))*(3/4, 1) = (4/5)*(3/4, 1) = (3/5, 4/5)
We have one of the four eigenvectors we need to calculate.

Next we return to the other eigenvalue, 245, and plug it into our eigenvector equation.

This time we get
-81*x1 -108*x2 = 0
-108*x1 -144*x2 = 0
Looking at the first equation again
-81*x1 -108*x2 = 0
-81*x1 = 108*x2
x1 = -108/81*x2
x1 = -4/3*x2
This time our eigenvector solution is (-4/3, 1), which we'll normalize below.
Find the length of the vector
sqrt((-4/3)*(-4/3)+1*1) = sqrt( 16/9 + 9/9) = sqrt(25/9) = 5/3
Again, scale by 1/length
(1/(5/3))*(-4/3,1) = (3/5)*(-4/3,1) = (-4/5, 3/5)
So now we've have unit length eigenvectors of AAT:
(3/5, 4/5) and (-4/5, 3/5).
AAT is symmetric and the eigenvectors of a symmetric matrix are orthogonal, which means their dot product is zero. This is clear by looking at them, but I'll multiply it out, because this post is all about being verbose:
(4/5, 3/5) dot (-3/5,4/5) = (4/5)*(-3/5) + (3/5*4/5) = -12/25 + 12/25 = 0
Let's add our other eigenvector to the first column U. It corresponds to the largest eigenvalue and the top-left "singular value" in the S matrix.

Now that we've calculated U and S, we can solve for V. In doing this, I'm going to exploit some of the properties of U and S.
First, let's multiply the left sides of both equations by the inverse of U. If you recall, because U is an orthogonal matrix, its inverse is its transpose, so we simply need to multiply the left side of the equation by the transpose of U to eliminate U on the right side. In this case, U happens to be symmetric, so it's also its own transpose (that won't always be the case).
A = U*S*VT =
U-1*A = U-1*U*S*VT =
U-1*A = S*VT =

Multiplying both sides by the inverse of S will leave us with VT on the right side. Because S is a diagonal matrix, the inverse is calculated by replacing each element on the diagonal with its reciprocal.
U-1*A = S*VT =
S-1*U-1*A = S-1*S*VT =
S-1*U-1*A = VT =

Multiplying everything out leaves us with the following:

At this point we know U, S and the transpose of V. Putting everything back together leaves us with:
A = U*S*VT =
Update (1/12/2007): If you're reading this, you may be interested in Jim Blinn's paper titled Consider the Lowly 2x2, which you can find on IEEE or in his book Notation, Notation, Notation.
If you want to write a program to calculate the SVD, don't infer the algorithms from this post; sound computational means are found in the classic text Matrix Computations by Golub & Van Loan.
This is post #12 of Linear Algebra for Graphics Geeks. Here are links to posts #1, #2, #3, #4, #5, #6, #7, #8, #9, #10, #11.
Next, some commentary on matrices, elipses and eigen decomposition.
posted by metamerist at
9:11 PM
![]()

3 Comments:
Thanks for the details...turned out to be useful to grasp the details.
Regards!
Is this also the right algorithm to decompose a matrix into Rotation, Scale and Rotation used for graphics. Suppose I know the CTM ( Current Transformation matrix ) on a shape, I want to know how can that transformation be achieved with Rotation, Scale and then another Rotation
I find the detailed explanation of calculating eigenvalues and eigenvectors very helpful.
Post a Comment
Subscribe to Post Comments [Atom]
<< Home